理化学研究所(理研)などの共同研究グループは巧緻(こうち)操作知能機械の実現に向けた研究開発プロジェクトに着手します。
本プロジェクトは、経済産業省、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)が公募を行った「ポスト5G情報通信システム基盤強化研究開発事業/触覚-動作統合に基づく環境適応型フィジカルAIの研究開発(委託)」におけるテーマ「非定型巧緻操作の自律化を実現する多感覚統合型物理知能と多指AIロボットの開発」を株式会社本田技術研究所と共に提案を行った結果、採択されたものです。
日本国内では労働人口の急減と高齢化が喫緊の課題となっています。2040年には深刻な人手不足に直面すると予測されている中、確実に作業を高確率でやり遂げるロバスト(頑健)性と現場で長時間使用できる器用さを備えたロボットの開発に取り組むことは、産業競争力の維持・強化のためにも極めて重要です。
理研は、人間の器用な作業を代替可能なAIロボットを構成するための基盤技術の研究開発を行います。本田技術研究所と連携し、「セットパック[1]」や「ワイヤハーネス組付け[2]」といった、不確実な難作業を高い信頼性で遂行できるよう、実証を通じて情報と実世界を接続する基盤を確立するとともに、労働力不足解消と産業競争力強化に貢献します。
研究開発プロジェクトの概要
開発の目的
現在世界の潮流となっているロボット基盤モデルやAIロボット開発のアプローチには、以下1~6のような、社会実装を阻む本質的な課題が残されています。
- 1.予測困難な環境変化に対する脆弱性(ぜいじゃくせい)
- 2.新規タスクへの不十分な汎化性能(はんかせいのう)
- 3.安全性・透明性への配慮不足
- 4.接触や摩擦などの物理的相互作用の知覚・モデル化が不十分
- 5.実環境データの収集には膨大な時間とコストを要し、絶えず変化し続ける実世界を十分にカバーすることは現実的に困難
- 6.計算リソースが限られるエッジサイド(ロボット本体など)において、リアルタイム制御と深い思考の双方を同時に満たすことが困難
本プロジェクトにおいて研究開発する技術群は、上記の根本的課題を解決するものでもあり、その社会的意義があるだけでなく、学術的側面からも極めて高い価値を持ちます。
本プロジェクトは、実世界環境において頑健かつ適応的に認識・行動可能な物理知能とその効率的な学習フレームワークの構築ならびに、構築した物理知能の非定型巧緻操作を担う多指AIロボットの実現に挑みます。
具体的には、触覚・視覚などの多感覚(マルチモーダル)情報から、物理特性を含めた状況の認識・予測・判断・行動生成を一貫して実行可能であり、かつ環境変化に頑健で安全性や透明性を持つ物理知能モデルを開発します。また、人的・時間的コストが極めて高い実環境におけるロボットのデータ収集に極度に依存せずにモデルを構築する手法の開発と、モデルの性能を継続的に向上させ即座に推論結果に反映する学習機構を構築します。加えて、計算資源の制約が厳しいエッジサイドにおいても、リアルタイム推論と深い思考を両立可能な計算フレームワークを開発し、これらが実行可能な頑健かつ高効率なAIロボットコンポーネントの設計・実装を行います。最終的には、上記の機能を統合し、従来は人手に依存せざるを得なかった非定型巧緻操作を、多感覚統合に基づき多指で自律的に実行するAIロボットを構築します。
巧緻操作が可能なAIロボットの実現は、従来自動化が不可能とされていた「非定型かつ複雑な手作業」の代替を可能にし、産業構造や生活様式に劇的な変革をもたらすと期待されます。工場でのワイヤハーネスなどの柔軟物の取り回しと複雑な局所作業、複雑で多様な物体の把持を筆頭に、製造業、物流、建設、農業といった多岐にわたる分野で革新をけん引し、2030年までに年間約2.9兆ドルの経済的価値を創出すると予測されています。
本プロジェクトは、日本が直面する労働人口の急減や熟練技能の継承という喫緊の社会課題に対し、技術的側面から確かな解決策を提示するものです。最先端のAI技術と高度な物理操作を融合させることで、国際競争力の維持のみならず、科学技術分野における日本のプレゼンス(存在価値)向上を実現します。最終的には、ロボットが人間と共存し、複雑な作業を自律的に分担する「ヒューマンフレンドリーな社会」の構築が期待できます。本プロジェクトの成果は、持続可能な経済成長と豊かな生活環境を両立させるための不可欠な基盤技術となり、社会全体に多大なインパクトを波及させます。
また、データ収集・モデル構築・その継続的な向上に至る一連のプロセスを効率的に実行できること、AIロボットが現場の状況を即座に認識し望んだ通りの動作を達成するまでの無駄な試行を最低限に抑えられることは、高いエネルギー効率を実現できることを意味します。本事業の成果を広範囲の応用に適用可能とすることで、GX(グリーン・トランスフォーメーション)を推進することも目指します。
開発の内容
本プロジェクトが具体的に想定する社会実装のターゲットは、製造現場における「セットパック」や「ワイヤハーネス組付け」といった、不確実性が極めて高い高度な手作業の知能化です。これらの作業には、部品と指先などの間に生じる力を感知する「繊細な触覚」の実現が不可欠であり、そのうえで触覚に即座に反応する「リアルタイム性」と複雑な干渉回避や作業計画を練る「深い思考」との二面性を克服することが最大の課題です。加えて、事前に想定しきれない部品の個体差や日々変動する実環境に対し、ロボット自らが現場での「継続学習」を通じて適応し続ける能力を実装することが、この極めて高い不確実性を乗り越え、社会実装を成功させるための重要な鍵となります。
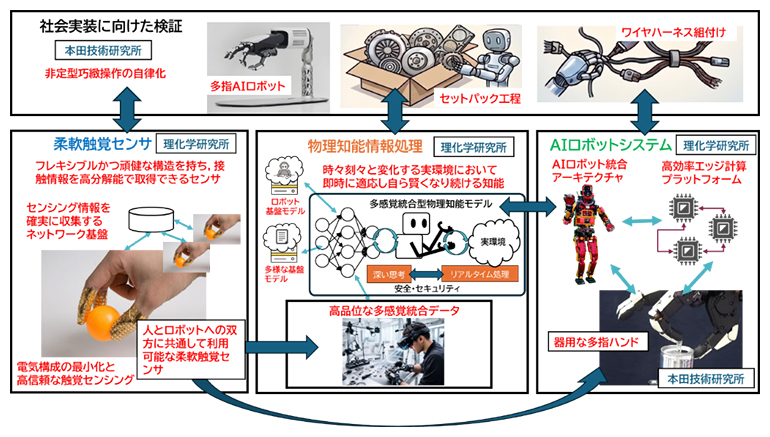
この難題に対し、本提案では以下の三つの研究開発項目を中核として推進します。すなわち、(a)物理知能情報処理、(b)柔軟触覚センサー、(c)AIロボットシステムです。これら3項目を相互に連携させ、情報処理からハードウェアまでを一体として最適化することで、実世界環境において自律的に学習・行動可能なAIロボットシステムの実現を目指します。さらに、得られた成果を統合し、(d)社会実装に向けた検証も実施します。各アプローチの役割は以下の通りです。
- (a)物理知能情報処理
視覚や触覚等の多感覚情報と行動を統合し、エッジ環境で即時応答と深い推論を両立する知能アーキテクチャーを構築します。現場での継続学習を通じ、未知の事象へも柔軟に適応し続ける「脳」を実現します。 - (b)柔軟触覚センサー
知能を支える「感覚器」として開発します。広範囲かつ高密度な接触情報を取得し、知能が状況を正しく解釈するための確かな基盤を提供します。 - (c)AIロボットシステム
これら知能と感覚をエッジ計算基盤上に実装します。メモリ転送を最適化した計算設計により、現場での即時応答と継続的な学習を物理的に支える「身体」を確立します。 - (d)社会実装に向けた検証
実際の部品供給や組付け工程において、統合システムとしての有効性を実証します。
本事業の核心は、適応的物理知能を構成する「脳(知能モデル)」「感覚(触覚・視覚)」「身体(多指ハンド+全身)」「現場(実環境)」の4要素を切り離すことなく、一体のサイクルとして設計・実装する点にあります。現場の微細な変化に即応するリアルタイム性と、全体の目的遂行に向けた計画的な思考を両立する物理知能は、これら4要素が相互に連関し、現場での実践を通じて絶えず「継続学習」を繰り返すことで初めて実現されます。この一気通貫の設計思想に基づくAIロボットは、視覚情報や事前教示に強く依存してきた従来のロボットでは到達困難であった不確実な環境下においても、経験から自律的に適応能力をアップデートし続け、高い信頼性をもって非定型巧緻操作を遂行可能にします。本事業は、これら一連のアプローチを基盤技術として確立し、製造を中心とした広い産業分野において、高度な手作業の知能化と社会実装の実現に貢献します。
理研では、最先端のAI研究に取り組んでいる革新知能統合研究センター(AIP)を中心として、複数の研究センターおよび社会実装に向けて、本田技術研究所をはじめとした産業界と有機的に連携するため、最先端研究プラットフォーム連携事業本部(TRIP[3])の仕組みを活用しつつ、シームレスな研究開発体制を構築します。
各機関の役割
- 理化学研究所
- 研究開発全体のとりまとめ。物理知能情報処理、柔軟触覚センサー、AIロボットシステムを行います。また、理論やアルゴリズムが実際に動くプロトタイプへの実装に向けた体制の整備を行います。
- 株式会社本田技術研究所
- ハードウェア設計、制御システム設計技術を持ち、社会実装の検証を担当します。具体的には、これまでの多指ハンドに関する研究開発、多指ハンドを用いたロボット動作学習の研究開発の成果を基に、自社工場の複数行程において、統合システムとしての有効性の検証を行います。
理化学研究所 研究代表者のコメント
革新知能統合研究センター フィジカルインテリジェンスグループ
グループディレクター 原田 達也
労働人口の減少が大きな社会課題となる中、人間が担ってきた複雑で繊細な手作業を、AIロボットが高い信頼性をもって支援できる技術の確立は極めて重要です。本プロジェクトでは、視覚だけでなく触覚を含む多感覚情報を統合し、接触や摩擦を伴う実世界の不確実な状況を理解しながら、自律的に判断・行動できる物理知能の実現に挑みます。特に、即時応答が求められるエッジサイドの制御と、全体の目的達成に向けた深い思考・計画を両立させることは、AIとロボティクスの双方における本質的な課題です。理研のAI、ロボット、柔軟触覚センサーに関する研究力を結集し、本田技術研究所との連携を通じて、製造現場をはじめとする社会実装につながる基盤技術を確立していきます。
参考リンク
補足説明
- 1.セットパック工程
サプライチェーンから入荷した多品種の部品群から、組み立てに必要な構成部品を選別・ピッキングし、組み立てラインへジャスト・イン・タイムで供給する工程。対象部品はサイズ、形状、梱包仕様(こんぽうしよう)が多様であるため、適切な把持戦略およびハンドリング手法の選択に加え、作業状況に応じた高度な認識・判断能力が要求される。 - 2.ワイヤハーネス組付け
車載用ワイヤハーネスは、自動車内で電力や信号を各機器に伝達するために複数の電線を束ねて整理・保護した重要部品であり、車両の機能や安全性を支える"神経"のような役割を担う存在。近年の電子化の進展により構造はますます複雑化し、狭い車内空間に適合するよう精密に設計されているが、多数の電線から成る特性上、柔軟で曲げやすい反面、取り扱いが難しいという課題を有している。そのため、製造や組み付けの工程においては、断線や損傷を防ぐための丁寧な取り扱いと高度な作業技術が求められる。 - 3.TRIP
理研において、2023年度から開始した、理研の強みである各領域の最先端研究をリードする最先端研究プラットフォーム群(スーパーコンピュータ「富岳」、量子コンピュータ、大型放射光施設「SPring-8」、X線自由電子レーザー施設「SACLA」、バイオリソース事業など)を有機的に連携させ、新たな知の領域を、研究分野を超えて効果的に生み出す革新的な研究プラットフォームを創り出し、特定の研究分野において解決が困難な科学的・社会的課題に対し、分野を越えてその解決を図るプロジェクト。TRIPはTransformative Research Innovation Platform of RIKEN platformsの略。
共同研究グループ
理化学研究所
革新知能統合研究センター
フィジカルインテリジェンスグループ
グループディレクター 原田 達也(ハラダ・タツヤ)
ロボットシステムチーム
チームディレクター 岡田 慧(オカダ・ケイ)
開拓研究所
染谷薄膜素子研究室
主任研究員 染谷 隆夫(ソメヤ・タカオ)
株式会社本田技術研究所
エグゼクティブチーフエンジニア 吉池 孝英(ヨシイケ・タカヒデ)
問い合わせ先
理化学研究所 数理・計算・情報科学研究推進部(AIP担当)
Email: aip-koho@riken.jp
機関窓口
理化学研究所 広報部 報道担当
お問い合わせフォーム